Using sensors including cameras and lidar, it autonomously created a 3D map of the surrounding site as well as finding suitable building blocks and rocks for the wall’s construction.
Scanning the stones allowed the robot to estimate the weight and centre-of-gravity of each, and an algorithm then matched these known stones to remaining locations on the growing wall.
“Our geometric planning algorithm uses a combination of constrained registration and signed-distance-field classification to determine how these should be positioned toward the formation of stable and explicitly shaped structures,” the researchers wrote in a paper describing the project (see below).
“The autonomous machine can place 20 to 30 stones in a single consignment – about as many as one delivery could supply,” according to the university.
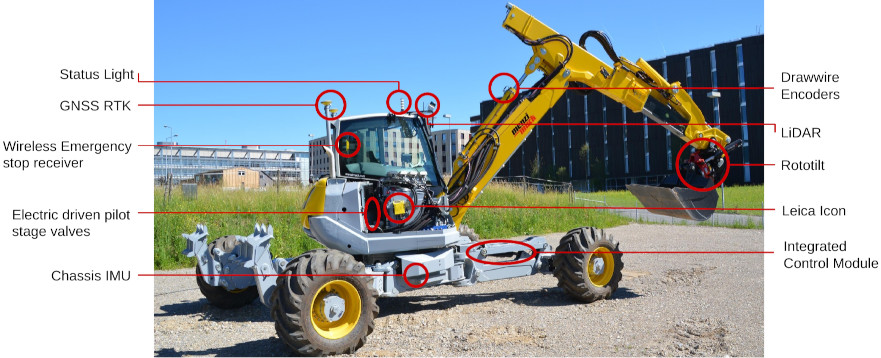 Known as Heap (hydraulic excavator for an autonomous purpose), the robot is a customised 12tonne Menzi Muck M545 with cameras, lidars, inertial measurement, satellite navigation and joint angle sensors.
Known as Heap (hydraulic excavator for an autonomous purpose), the robot is a customised 12tonne Menzi Muck M545 with cameras, lidars, inertial measurement, satellite navigation and joint angle sensors.
The wall retains terraces in a park, which is now complete and open to the public, project scientist Ryan Luke Johns told Electronics Weekly – It is Circularity Park in Oberglatt Switzerland, which has a circular economy education theme.
Read more in the Science Robotics paper A framework for robotic excavation and dry stone construction using on-site materials – only the abstract is available without payment.
The brief associated YouTube video is well worth a look, and this freely available earlier paper, which is published by Springer, shows how stone placement planning works.