Named FiloBot, it is the work of the Bioinspired Soft Robotics Laboratory at the Fondazione Istituto Italiano di Tecnologia in Genova.

FiloBot it builds its own stem-like body, up to several metres long, curving it permanently in response to light, dark or gravity, and it can also vary the strength of its body depending on its environment.
There are three parts: the 40mm diameter head (white cone in photo right, more details below), a body of the same diameter (blue) and base unit (not visible).
When it starts, the head sits on the base unit and there is no body.
Growth begins when the head starts to rotate, depositing a thin stream of melted plastic from a point on its edge, that hardens into a circle. Ring after ring is deposited in the form of a continuous spiral – gradually making the body, which jacks the head skyward layer by plastic layer.
The head is a triumph of miniaturisation, containing: two motors with drivers, the rotation mechanism, the deposition mechanism, Bluetooth microcontroller, three-axis accelerometer and colour sensor – Bluetooth is for telemetry and debug, but not for control as the robot is autonomous – its growth is emergent without pre-planning or external guidance.

This body was grown in the lab, then placed around a tree for… fun, essentially
Steering is by depositing more or less plastic at different points in 360° of rotation, and the same variable deposition technique is used to make the body strong (more plastic all the way around) when it has to cross a gap or resource-frugal (less plastic) when it can rely on something something else for support as it climbs. Longitudinal growth is at 2 – 7mm/min.
Motivation for steering is, just like a plant, through gravity perception and the levels of blue, red and far-red. Algorithms are varied assessed by comparing the resulting growth with real plants.
For the biologically-inclined, it has so far been used to demonstrate: twining, gravitropism, phototropism and skototropism.
The head
To rotate the head, it has a short sleeve inside the body with springs around it that push outward. The ends of the springs are shaped to resist slipping circularly around inside the hollow body, while easily sliding longitudinally as the body is extended.
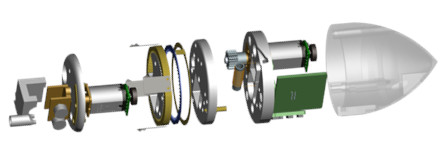 For rotation, teeth cut into the inside of the sleeve mesh with a gear on the end of a motor fixed to the spinning part. The second motor hauls 3d printing filament up the length of the body from a spool in the base unit, and pushes it out through a of the deposition nozzle via the heater that melts it.
For rotation, teeth cut into the inside of the sleeve mesh with a gear on the end of a motor fixed to the spinning part. The second motor hauls 3d printing filament up the length of the body from a spool in the base unit, and pushes it out through a of the deposition nozzle via the heater that melts it.
All this, and the electronics, is squeezed into ~42cm3 and 82.5g.
Because the head is spinning and the body is not, the plastic feed filament inside the body is twisted and would eventually tangle, so the storage reel inside the base sits on a freely-rotating joint to dissipate that twist.
Two wires pass up the inside of the body, and supply power to the head via slip-rings built into the head, and the the last thing that passes up the body is cooling air for the head from fans in the base unit.
Fondazione Istituto Italiano di Tecnologia worked with the University of Montpellier, France.
The work is covers in an interesting and a very readable paper: ‘A growing soft robot with climbing plant–inspired adaptive behaviors for navigation in unstructured environments‘, published in Science Robotics.