 Renesas is aiming a set of microcontrollers at industrial equipment needing real-time Ethernet control.
Renesas is aiming a set of microcontrollers at industrial equipment needing real-time Ethernet control.
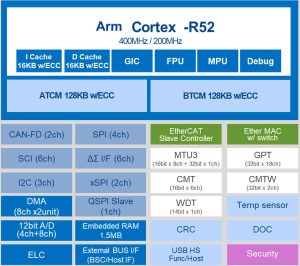
Dubbed RZ/N2L, the MCUs have an integrated time-sensitive networking (TSN) compliant three port Gigabit Ethernet switch and an EtherCAT slave controller. They support industrial network communication protocols including EtherCAT, Profinet RT, the new Profinet IRT, EtherNet/IP and OPC UA.
“By using the RZ/N2L as a companion chip complementing a host CPU, customers can add industrial Ethernet to their equipment without major changes to its internal configuration,” said Renasas. “Since RZ/N2L can perform network processing independently of the external CPU, industrial Ethernet can be added to systems without the need for major changes to the existing application software.”
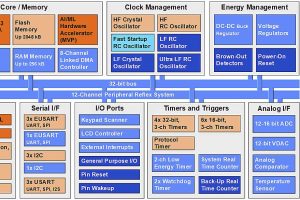
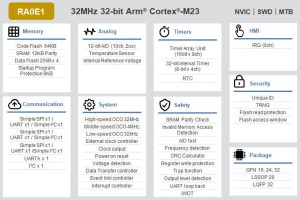
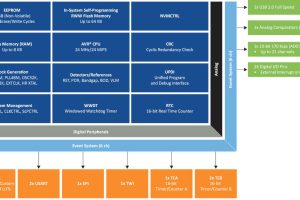
Processing comes from the on-chip 400MHz Arm Cortex-R52 (Cortex-R cores are Arm’s real-time cores) which is integrated with ECC (error-corrected) ram: 256kbyte tightly-coupled and plus 1.5Mbyte.
Parallel and serial interfaces are provided for fast access to the host CPU, and the external CPU can directly access communication data stored in RZ/N2L system RAM.
There are four devices in the family: 225pad FBGA versions have the parallel bus for host connection, 121pad FBGA versions do not have the parallel bus and have other limitations. Both package types are available with or without security functions.
For stand-alone use of all types, peripherals include a trigonometric function accelerator, many PWM outputs (including three-phase complementary), six delta-sigma interfaces, two 12bit ADCs, 6x UART, 2x CAN interfaces and 3x I2C channels.
“UART and CAN functions enable the RZ/N2L to serve as a gateway for converting from a fieldbus based on RS485 or CAN to Industrial Ethernet,” said Renesas.
Functional safety is supported through self-diagnostic software and a “functional safety platform software soon to be offered by Renesas in 2023”, it said.
Two proof-of-concept boards are available built around the chips: one for industrial Gbit Ethernet for implementation on a system-on-modules plus a carrier board, with two Gbit Ethernet interfaces plus Pmod and Arduino interfaces. The second is a 220V ac servo motor control with EtherCAT.